Executive Summary
- Humanoid robots represent a new battery demand class distinct from EVs and grid storage, driven by labor substitution rather than mobility or energy arbitrage.
- Leading manufacturers (Tesla, Figure, Agility) are targeting humanoid deployment in logistics, manufacturing, and services between 2026–2030, according to public roadmaps and investor disclosures.
- Typical humanoid energy requirements are ~2–5 kWh per unit, with long daily runtime (8–20 hours) and shallow cycling — a duty cycle closer to industrial systems than EVs.
- At scale, 1 million units/year implies ~2–5 GWh/year of battery demand, excluding replacements and redundancy — comparable to early EV platform volumes.
- These systems prioritize calendar life, safety in human proximity, and predictable degradation over energy density or fast charging.
- Existing EV-derived battery roadmaps are structurally misaligned with these requirements, creating whitespace for application-specific battery systems.
Why Humanoids Create a New Battery Market
Humanoid robots are not designed to outperform existing automation on efficiency. Wheeled robots and fixed systems already dominate structured environments. The constraint they face is deployment, not capability. Most industrial, commercial, and service environments are built for humans—stairs, doors, tools, shelving, and safety workflows—and retrofitting these spaces for task-specific automation is slow, capital-intensive, and difficult to scale. Humanoids deliberately trade mechanical efficiency for infrastructure compatibility, enabling rapid deployment into existing human-built environments.
This design choice reframes humanoids as labor substitution platforms, not task-specific machines. The value proposition shifts from throughput per watt to work delivered per dollar over system life. A single humanoid platform can perform a wide range of variable tasks and expand capability via software rather than hardware redesign, placing a premium on uptime, predictability, and safety.
Consistent with MIT’s Efficiency Principles for Quadrupeds, legged systems are constrained by energy per unit of useful work, not peak power. As a result, humanoid batteries must prioritize calendar life, shallow-cycle durability, and near-zero failure tolerance—requirements fundamentally misaligned with EV-optimized battery roadmaps.
What the Data Says
Public disclosures and research across robotics, automation, and labor economics point to humanoids targeting environments where infrastructure retrofits are prohibitively expensive.
- According to IFR and McKinsey automation studies, 60–70% of warehouse and light-industrial tasks remain only partially automated due to variability and human-centric layouts.
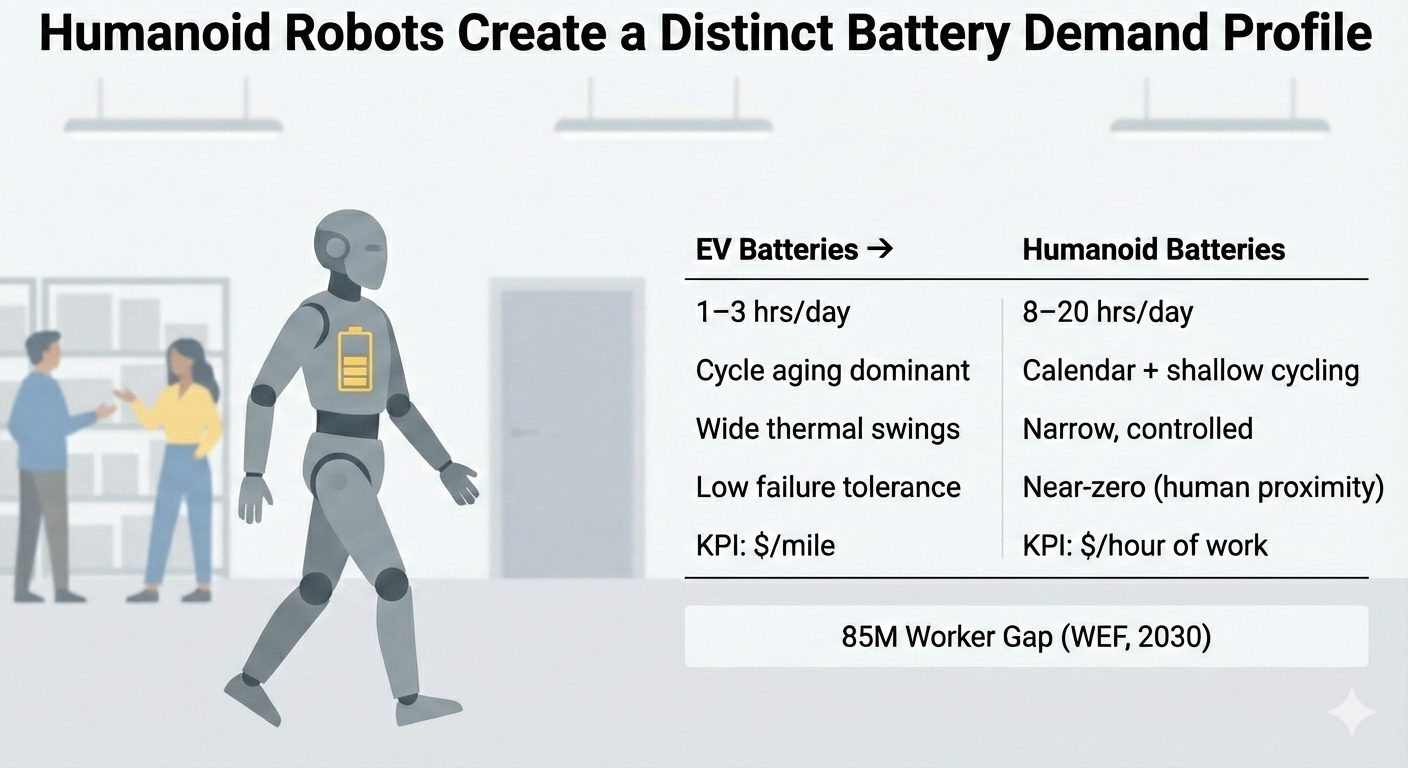
- Labor shortages in logistics, manufacturing, and elder care are projected to exceed 85 million workers globally by 2030 (World Economic Forum).
- Humanoid platforms are explicitly designed to operate in existing human-built environments, avoiding the 5–10 year timelines typical of large automation retrofits.
Table 1. EV vs Humanoid Battery Duty Cycle
Table 1 highlights why EV-derived battery roadmaps misalign with humanoid requirements.
Program implication: humanoid platforms require battery systems designed and validated as long-lived infrastructure assets, not derivative EV components.
| Parameter | EV Battery | Humanoid Battery |
|---|---|---|
| Typical daily usage | ~1–3 hours driving | ~8–20 hours active |
| Depth of discharge | Moderate to deep | Shallow, repetitive |
| Cycling driver | Distance traveled | Time-on-task |
| Dominant aging mode | Cycle aging | Calendar + shallow cycling |
| Thermal profile | Wide swings | Narrow, controlled |
| Failure tolerance | Low | Near-zero (human proximity) |
Humanoid Battery Design Targets (Order of Magnitude)
- Energy: ~2–5 kWh per unit
- Runtime: 8–20 hours/day, shallow cycling
- Lifetime: 5–10 years (calendar aging dominant)
- Safety: Near-zero failure tolerance (human proximity)
- Economics: <$100/kWh → KPI = $/hour of work
Market Scale and Demand Implications
Scale signal: 1 million humanoids/year × ~2–5 kWh/unit → ~2–5 GWh/year of new battery demand (excluding replacements and redundancy).
This volume is sufficient to justify application-specific battery platforms and dedicated supply chains.
Conclusion
Electric vehicles taught the industry how to scale batteries for transportation. Grid storage taught it how to scale batteries for duration and cost. Humanoid robots introduce a third axis: batteries designed for work.
The defining metric shifts from miles per charge or cycles per cell to work delivered per dollar over system life. The strategic question is no longer whether humanoids will scale, but whether existing battery portfolios are aligned to support them.
For product and program leaders, the challenge is not proving feasibility, but aligning battery roadmaps, validation strategies, and supply chains to this emerging duty cycle early.
References
- MIT — Efficiency Principles for Quadrupeds
- International Federation of Robotics (IFR), World Robotics Reports (2023–2025)
- McKinsey Global Institute — Automation, AI, and the Future of Work
- World Economic Forum — Global Labor & Skills Outlook
- Public investor disclosures from Tesla, Figure AI, and Agility Robotics